This Mermaid Robot Helps Scientists Hunt for Sunken Treasure
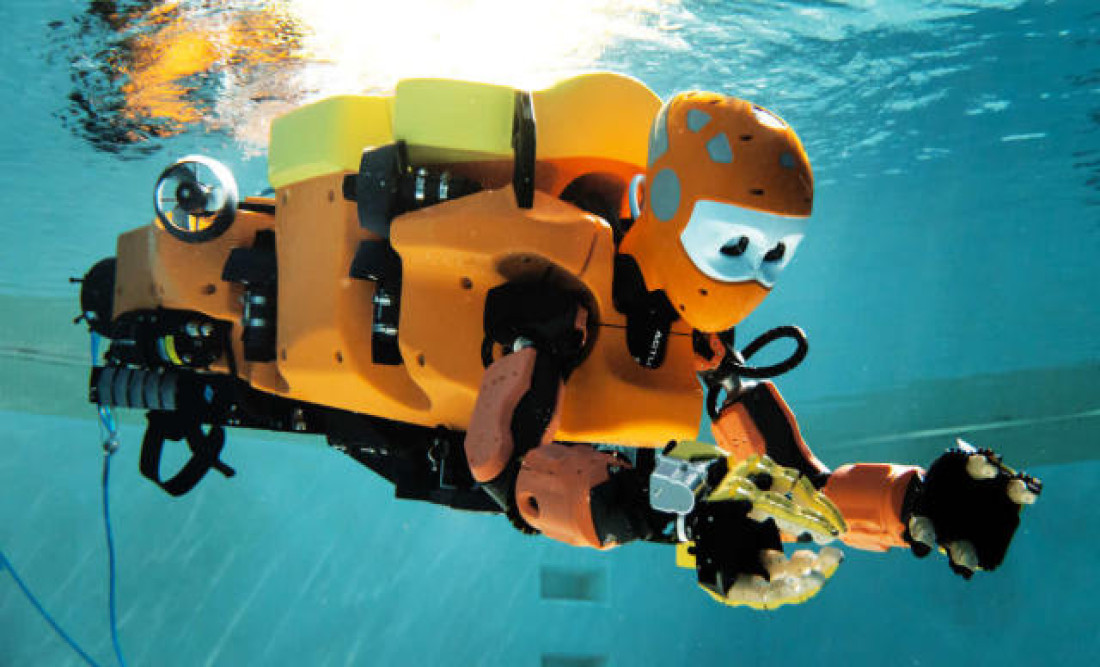
In excess of 330 meters underneath the outer layer of the Mediterranean, OceanOne, a humanoid sub created by Stanford University's Robotics Lab, surrounded its objective: the Aléria, a second Century Roman wreck that held old fortune. Briefly, the sub drifted simply over the seabed in the quiet obscurity. A more modest partner robot close by straightened out its spotlight, enlightening the ground. Then OceanOne delicately dove its fingers into the sand at the foundation of the disaster area, and began searching.
"I'm seeing through the eyes of the robot, and I'm contacting through the hands of the robot," Oussama Khatib, head of the Robotics Lab at Stanford, told The Daily Beast. Cautiously, the robot's hands delicately brushed the sand. It halted, straightened out its hold, and uncovered a little item out of a concise puff of residue. Khatib brought it closer into view: a close to impeccably safeguarded oil light from the Early Roman Empire. "What is significant is that you have a hand and arm that is exceptionally consistent, that you can delicately close your hand around the item and take it," Khatib told The Daily Beast. "Then you won't break it. There could be no different arms like this for paleohistory. It is actually another innovation."
The center innovation Khatib is alluding to is haptic criticism. Now and again called sensation correspondence or 3D touch, haptic innovation makes an encounter of touch by applying powers, vibrations, or movements to the client. Also, it is assisting researchers with loving Khatib investigate new wildernesses in their exploration. The OceanOne endeavor, which occurred off the shore of Corsica in July 2022, was the longest and most profound submerged mission testing haptics of its sort, arriving at one kilometer down. The task began in September 2021 with two locales close to Marseilles. The initial, a World War II P-38 Lightning airplane, which sat at 40 meters and a submarine, Le Protée, resting at 124 meters. From that point forward the OceanOne robot has gradually been expanding its profundities.
The group, which was made out of a global unit of roboticists, sea life scientists, and submerged archeologists, tries to utilize the haptic robot to "investigate puts nobody has gone previously and to demonstrate the way that human touch, vision, and intelligence can be brought to these destinations distant from where individuals can work," as indicated by Stanford News. Every one of the robots in the mission were controlled from the Alfred Merlin, an exploration vessel planned by Michel L'Hour while he was overseer of the French Department of Underwater Archeology (DRASSM).
"For a paleontologist, the two significant faculties are sight and contact. It's as yet conceivable to manage without sight while working in exceptionally filthy water. On the off chance that we don't see this idea of touch, it is difficult to see assuming the article is delicate — assuming it is broken, for instance. Haptic hands are in this manner significant." L'Hour told The Daily Beast. "The paleologist is a sort of specialist from an earlier time. Might we at some point envision a specialist who might work without feeling what he contacted? It's the most ideal same for us."
Inside the Alfred Merlin, Khatib wore exceptional glasses that permitted him to move the robot's head, and see the submerged climate in 3D through the robot's two eye cameras. He held the oil light and watched one more partner robot, directed by The French Department of Underwater Archeology, slide close to OceanOne. It contacted down an open compartment on the seabed. Khatib turned OceanOne's arms, brought down the ancient rarity utilizing the haptic hands, and delicately delivered the oil light into the holder. Then the aide robot shut the holder cover and gradually began the hour and a half rising to the surface.
Altogether the OceanOne's outing to the Aléria brought back four Early Roman Empire oil lights and an unblemished lavish container. "The oil lights found on the Aléria wreck bear critical engravings for dating the freight and grasping the monetary and verifiable climate of the site." L'Hour told The Daily Beast. "These are fundamental to comprehend and date the disaster area Aléria and to comprehend where this disaster area is situated throughout the entire existence of monetary trades via ocean in Roman times in the Mediterranean." L'Hour and Khatib both affirmed that the relics could never have been saved without the assistance of such exact haptic criticism on the OceanOne.
After the Aléria, the group cruised to Le Francesco Crispi, an Italian steamship sunk by a British torpedo in 1943. OceanOne had previously visited the Crispi in February yet mechanical issues with one of the arms thwarted the activity. One test the group confronted was that the disaster area sits around 500 meters beneath the Mediterranean's surface. That is around 33% of a mile down, and more profound than ever previously.
"We expected to upgrade the hardware," Khatib told The Daily Beast. "Oscillators at 1000 meters of tension will be obliterated. So we needed to go to strong state oscillators and capacitors." Khatib and the group at Stanford expected to keep the arms light and able, while likewise protecting delicate haptic hardware. So to battle the massive strain at the profundity of the Crispi, the group, in a joint effort with Meka Robotics, made a procedure for matching inner and outer tension involving oil in the robot's arms. "There is a compensator that takes the strain from the water and presses it into tubing, which keeps the oil a similar tension inside as outside." Khatib told The Daily Beast. This time OceanOne had the option to investigate the Crispi completely. Utilizing haptic hands, Khatib held a camera fixed to a long bar. He then calculated it into little crevices of the boat to examine the inside for breaks and curios. All the while, the group found another sort of iron-oxidizing rust that had never been seen.
Be that as it may, haptic innovation isn't simply assisting us with better controlling and investigate our current circumstance submerged, it's being utilized on the International Space Station. Dr. François Conti is the prime supporter of Force Dimension, a Swiss-based haptics frameworks organization. He is likewise a previous understudy of Khatib's at Stanford and dealt with fostering the OceanOne project. Conti accepts that later on, haptic frameworks will empower us to fabricate structures with robots on the moon.
"The thought is that we can now begin chipping away at the moon, we can have space travelers tele-working those robots, as though they're there," Conti told The Daily Beast. "So we see a wide range of regions where you understand getting haptics is unimaginable, on the grounds that you can now begin fixing satellites from a distance, working a robot on the moon." In November 2019, Force Dimension, in a joint effort with the European Space Agency (ESA), conveyed haptic connection points to the International Space Station. Named the METERON project (Multi-Purpose End-To-End Robotic Operation Network), it was tried by space travelers on the ISS to control earthbound robots in the Netherlands utilizing haptic criticism. Also, at last, as Conti told The Daily Beast, "you can shake hands from Earth to space."
While there is no tension, water, or gravity to fight with in space, haptic correspondences have their own arrangement of difficulties working in external circle. The two greatest obstacles were speed and distance, Conti said. The ISS twirls around the Earth at 17,500 miles each hour, making full circumnavigation of the globe at regular intervals. It's likewise roughly 250 miles from ocean level, contrasted with OceanOne, which lowered 33% of a mile. So to represent the speed and distance, Force Dimension connected to a "group of stars of satellites to make a web association with Earth," Conti made sense of. This way the ISS would continuously be daisy-binded to a solitary point on Earth, while quickly twirling around it.
The smallest slack in haptic criticism could have a significant effect while managing delicate items like relics and space gear. Be that as it may, both Conti and Khatib said their frameworks consolidate calculations to relax any postponements. Eventually, whether it's under 1000 pounds of tension or drifting at zero gravity, haptic criticism is assisting us with better investigating and reestablish our inside and outer universes. Mankind's capacity to bridle haptics is assuming a critical part in propelling the ways we pilot ourselves later on. Also, as Khatib said, "When you contact, it's finished. Contacting something a portion of a kilometer down, it turns out to be genuine."

Benjamin K
Benjamin K is a dedicated writer who loves to write on any subject. Benjamin K maintains a similar hold on politics, entertainment, health, abroad articles. Benjamin K has total experience of 3 years in web and Social. Benjamin K works as a writer in Wordict Post.







A 4.4 magnitude earthquake that struck Northern California only caused minor damage.
Posted on 14th Sep 2022


Holocaust allegation by Palestinian president rejected
Posted on 17th Aug 2022